This model is one of my first self-made projects. At that time (2011) I tried to build a robot that can only move on its legs. I used the legs of a spider to design the mechanics, but I only wanted to use one motor per leg. So I had to develop kinematics which generates the complex leg movement with only one rotation. In the model, I used one motor for the left 4 legs and one for the right 4 legs so that I was later able to control the robot with an IR remote control. Unfortunately, I have no video recordings of this model.
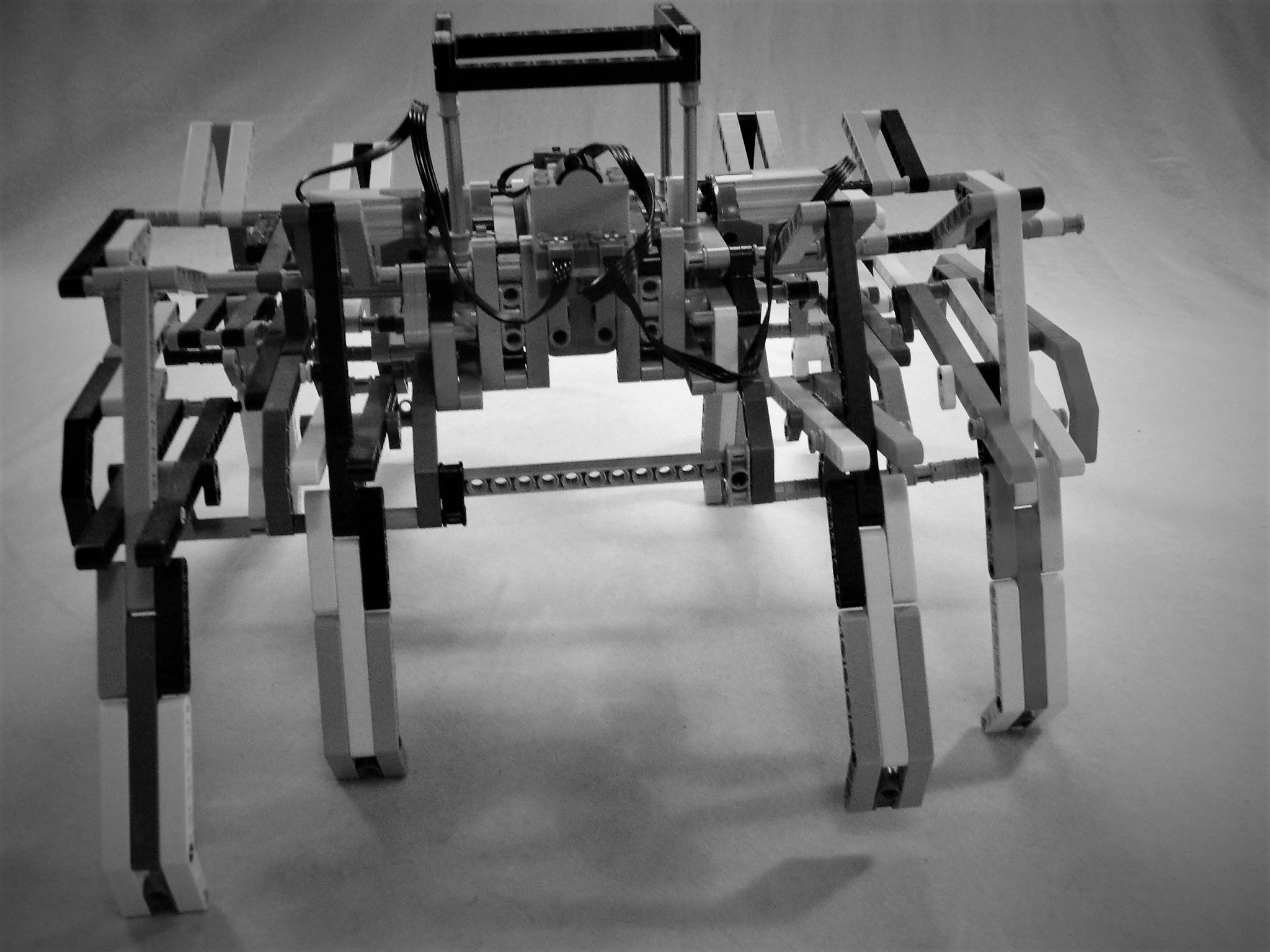



However, I have created a small animation of one leg to show how it works.
The first variant is a direct replica of the model as I built it. You can see that the foot movement is not perfectly horizontal.
In the second animation I changed the position of the upper pivot point a bit, so that the foot movement now looks very good. Next time I will definitely use this setting.


0 Comments