Robotic
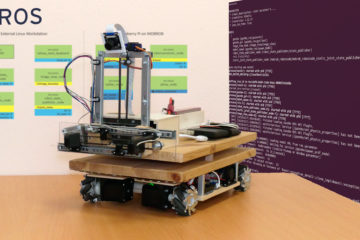
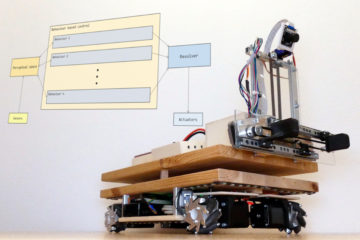
MOBROB: Behaviour-Based Control
In this article, I present the central concept of the robot control of my mobile robot. There are many different variants to structure the software for a robot. I will show you which one I implemented in MOBROB. Direct control The simplest option is the so-called direct control. Here, a Read more…